주요 연구성과
NEW 김의겸 교수팀, 복잡한 표면까지 감지 ‘로봇’ 촉각정보 측정법 개발
- 2024-04-16
- 2173

기계공학과 김의겸 교수팀이 복잡 난해한 표면의 접촉 정보를 빠르고 정확하게 측정할 수 있는 신개념의 접촉 감지 방법을 개발했다. 휴머노이드 로봇·산업용 협동 로봇의 촉각 감지 장치로 활용되어 보다 긴밀하고 원활한 인간·로봇 협력 작업을 가능케 할 것으로 기대된다.
김의겸 기계공학과 교수는 복잡 난해한 비정형 표면에서도 접촉 측정이 가능한 알고리즘을 개발했다고 밝혔다. 이번 연구 내용은 ‘인간-로봇 협력 작업을 위한 비정형 형상의 접촉 감지 방법(Arbitrary Surface Contact Sensing Method for Physical Human-Robot Interaction)’이라는 제목으로, 자동화 및 제어 분야의 저명 학술지인 <IEEE 산업정보학회 저널(IEEE Transactions on Industrial Informatics> 3월호에 게재됐다.
아주대 기계공학과의 정다운 연구교수(위 사진 가운데)와 부성운 학생(석사과정, 위 사진 오른쪽)이 공동 제1저자로 참여했고, 김의겸 교수(교신저자, 위 사진 왼쪽)가 함께 참여했다.
로봇 분야에서 ‘접촉 정보’는 조작, 인지, 상호작용 등 다양한 측면에서 중요하게 활용된다. 접촉 정보란 ▲외부 물체와 접촉된 위치와 방향 ▲작용하는 힘의 강도를 모두 포함한다. 그동안 접촉 정보를 정확하게 측정하기 위해 많은 장치와 방법들이 연구되어 왔으나, 여러 한계들로 인해 아직 완전하게 정밀한 측정은 이루어지지 못하고 있다. ▲측정 성능이나 ▲기계적·전자적 연결 구성의 복잡성 ▲다중 신호 처리를 위한 소프트웨어 등 어렵고 도전적인 문제들이 아직 해결되지 못한 채 남아있기 때문이다.
그중 기존 힘·토크 센서를 이용해 접촉 정보를 측정하는 방법은 측정되는 6축의 힘과 표면 형상의 수학적 모델을 이용한 기하학적 관계를 활용하여 구현되고 있다. 그러나 원통이나 구형처럼 정형화된 표면이 아닌, 복잡한 비정형 형상의 표면에 대해서는 이러한 기하학적 관계를 알기가 매우 어렵거나, 필요한 연산량이 많다. 이러한 이유들로 복잡한 표면에 대한 접촉 정보 측정 방식이 정교하게 개발되지 못했고, 때문에 로봇 시스템에의 실제 적용이 불가능했다.
김의겸 교수 연구팀은 이러한 한계를 극복하기 위해 원천적으로 새로운 방법론에 착안했다. 더불어 지속적 연구를 통해 접촉 정보 측정을 위한 알고리즘 개발부터 장치 디자인, 구현 및 검증까지를 직접 진행했다.
연구팀은 주로 컴퓨터 그래픽에서 물체의 형상을 표현할 때 사용되어온 삼각메쉬구조(Triangle mesh structure)를 표면 기하학적 정보를 알아내기 위해 활용했다. 이를 통해 수많은 삼각형으로 이뤄진 메쉬구조에서 정확한 접촉 정보를 알아내는 알고리즘을 개발해냈고, 접촉력의 크기뿐 아니라 3차원 방향과 3차원 위치를 모두 정밀하게 측정하는 데 성공했다. 연구팀은 0.4ms의 빠른 연산 속도로, 0.134mm 이내의 정밀한 접촉 위치 정보를 확인했다.
김의겸 교수는 “이번 연구는 다양한 형상 표면에 대해 실시간으로 정밀하게 접촉을 감지할 수 있음을 보여주는 성과”라며 “정교한 힘 제어가 필요한 휴머노이드 로봇이나 산업용 협동 로봇 등에 활용될 수 있을 것”이라고 설명했다.
산업 공정에서 인간과 로봇의 원활한 협력(interaction)을 위해서는 협동 로봇(co-robot)의 안정성과 정교함이 필수적이다. 협동 로봇은 일반적인 산업용 로봇처럼 위험이 수반되어 별도의 단독 공간이 필요한 경우와 달리, 사람과 물리적으로 상호작용하면서 같은 공간에서 작업할 수 있는 로봇을 말한다. 사람과 로봇이 같은 공간에서 작업을 하기 위해서는, 작업자와 로봇이 충돌해도 작업자가 안전할 수 있어야 하며 로봇이 제대로 작동할 수 있도록 비교적 간단한 방법으로 교시(敎示, teaching)가 가능해야 한다. 이에 아주대 연구팀의 이번 성과를 기반으로 보다 원활하고 다양하며 섬세한 인간의 협동 로봇 조작 작업 교시가 가능해질 수 있을 것으로 기대된다.
김 교수는 “이번에 개발한 기술을 협동 로봇에 적용하면 로봇과의 커뮤니케이션 범위가 더 넓어질 수 있다”며 “사람이 직접 로봇을 잡고 방향이나 위치를 조작하거나, 간단한 그림을 로봇 팔에 직접 그리는 등의 방식으로 여러 작업을 교시할 수 있다”라고 덧붙였다.
더 나아가 신개념의 디스플레이나 모빌리티 등의 터치 패널로 활용되어 새로운 형태로 센서 데이터를 얻는 데에도 적용될 수 있을 것이라는 게 연구팀의 설명이다.
김의겸 교수는 지능형 로봇(Interactive & Intelligent Robotics) 분야를 연구하며 ▲섬세한 도구 조작까지 가능한 일체형 인간형 로봇 손 ▲전 방향 물체 조작이 가능한 다자유도 로봇 그리퍼 ▲자동화 로봇 보정 장치 등을 개발해 학계와 산업계의 주목을 받아왔다.
이번 연구는 산업통상자원부의 로봇산업핵심기술개발사업의 지원으로 수행됐다.
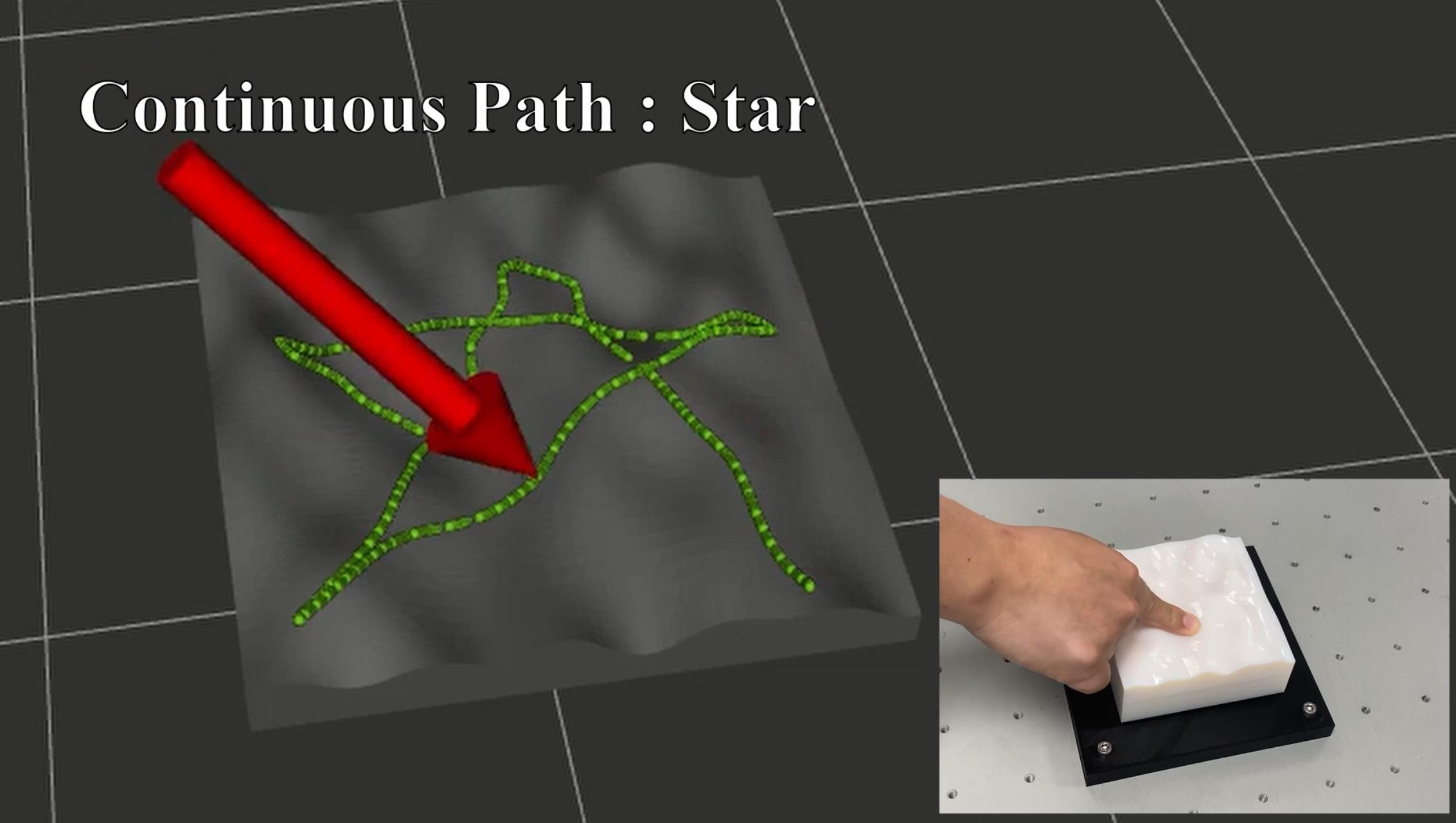
복잡한 비정형의 표면에서 별 모양을 그렸을 때 인식하는 모습. 힘의 위치와 방향, 크기 모두를 빠르고 정확하게 알 수 있다.
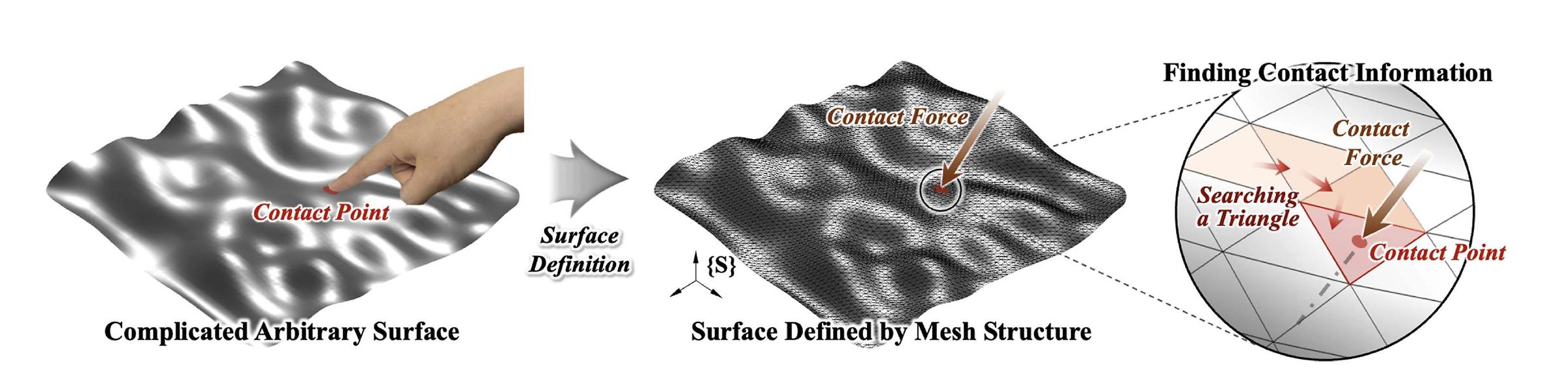
아주대 연구팀이 개발한 복잡한 표면에서 접촉력 찾기 방법의 전체적인 구성. 복잡한 형상의 표면을 삼각형메쉬형태로 재구현하여 표현한 사진. 많은 삼각형 중 실제 접촉이 일어나는 삼각형을 찾고, 삼각형 안에서 정확히 어느 위치에 접촉력이 가해지는지 찾는 과정이다.